Table of content
[Toc]
April 12th
First meeting
Objective:
to find out which data we are going to use and which method to analyse it because good understanding of the data can help researching simpler and more accurate. It can also inform me important information about features engineering or neural network designing.
Results:
data: https://openneuro.org/datasets/ds003682
28 participants viewing 14 image stimuli
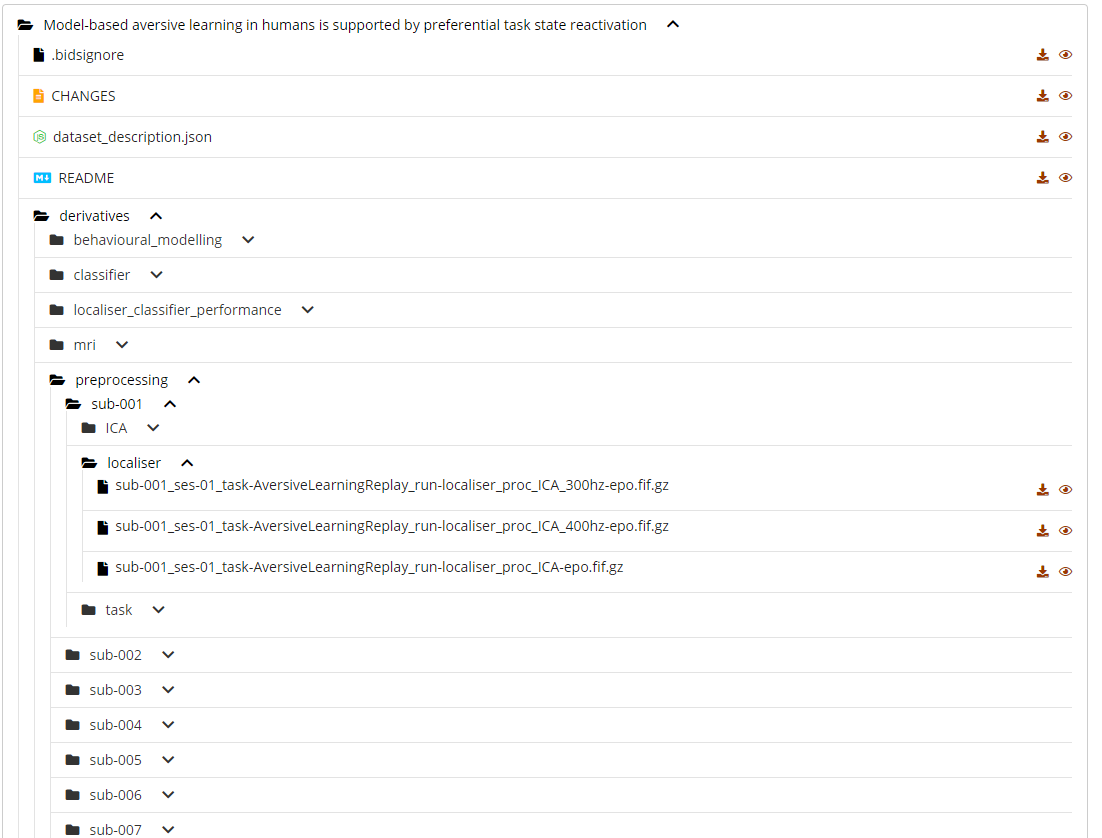
The file we cares:
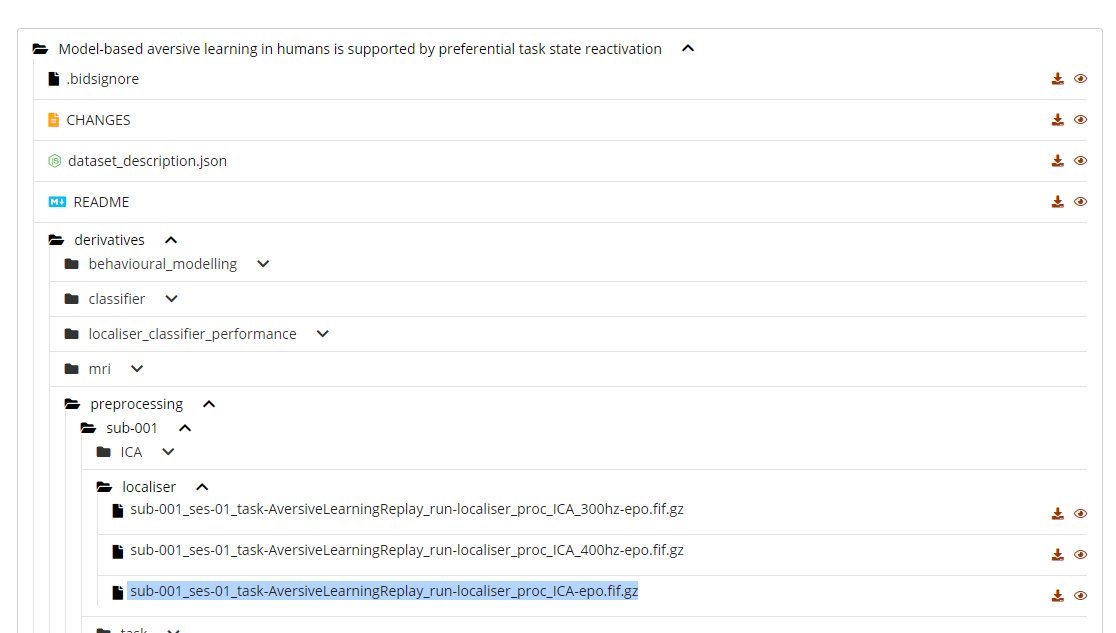
I can use MNE-Python to analyse it because MNE-Python package is highly integrated allowing an easy access to analysing.
What these files do can be achieved with:
https://mne.tools/stable/generated/mne.read_epochs.html
More templates can be found in:
April 13th
First session meeting
Objective:
learn how to write a lab notebook
Results
General understanding:
Title: the utility of multi-task machine learning for decoding brain states
Table of Contents:
page numbers; date; title/subject/experiment
Gantt charts is good to help organise time.
April 18th
Install MNE-Python via pip:
Objective:
to upgrade environment manager and compiler to the latest stable version because I always tend to use the latest version of packages which is supposed to be more compatible
Results:
Update Anaconda via conda upgrade --all and conda install anaconda=2021.10
The Python version I am using is:
Python 3.9.12 |
get the data:
git clone https://github.com/OpenNeuroDatasets/ds003682
Install MNE:
conda install --channel=conda-forge mne-base
April 19th
Second meeting
Objective:
to have a general understanding of the data and figure out details about methods because these are what I am going to feed into the network so that I should have a clear recognition for each part.
x_raw
x_raw.shape
y_raw
time = localiser epchoes
Results:
what I have known:
scikit-learn (machine learning library) is an available package I am going to use
use PCA to reduce dimensions

what need to be learned:
1. normalization, regularization
lasso L1 = sets unpredictive features to 0
ridge L2 = minimises the weights on unpredictive features
elastic net L1/L2
2. search
random_search randomizedsearchCV to test the performance
3. Neural network
neural network can be the best way for logistic leaning
4. validation
April 24th
Objective:
to play with existing code https://github.com/tobywise/aversive_state_reactivation because it can inform me code grammars analysing MEG data and it will make a foundation for my following coding
Results:
Epochs
Extract signals from continuous EEG signals for specific time windows, which can be called epochs.
Because EEGs are collected continuously, to analyse EEG event-related potentials requires “slicing” the signal into time segments that are locked to time segments within an event (e.g., a stimulus).
Data corruption
The MEG data in the repository https://openneuro.org/datasets/ds003682 is invalid, possibly because of data corruption
incomplete copying led to corrupted files
The following events are an example present in the data: 1, 2, 3, 4, 5, 32
event_id = {'Auditory/Left': 1, 'Auditory/Right': 2, |
sklearn.cross_validation has been deprecated since version 1.9, and sklearn.model_selection can be used after version 1.9.
April 25th
Install scikit-learn (sklearn)
use the command line
conda install -c anaconda scikit-learn
Start the base environment in Anaconda Prompt: activate base
And install jupyter notebook, numpy and other modules in the environment
conda insatll tensorflow |
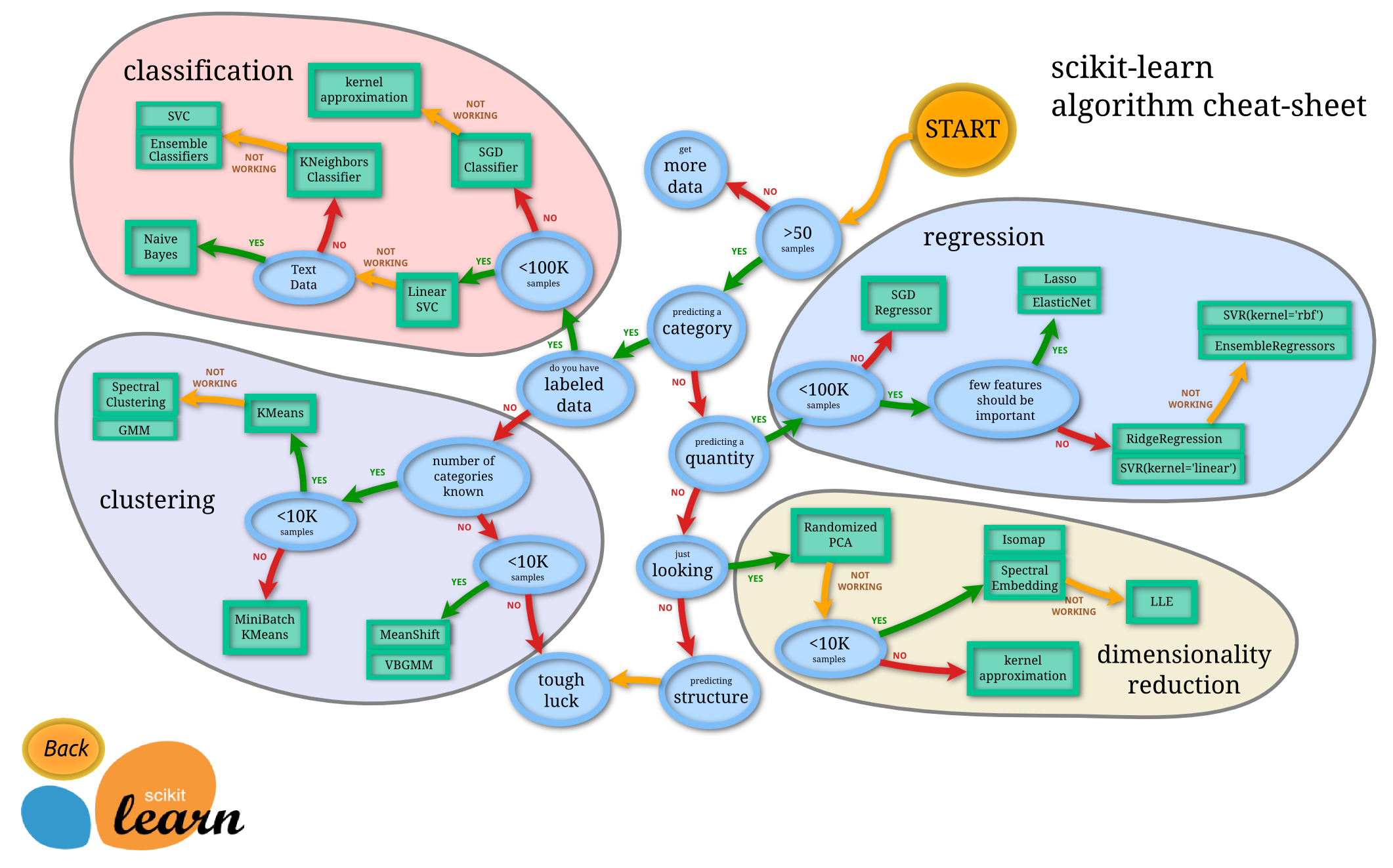
Learn how to choose the right algorithm
https://scikit-learn.org/stable/tutorial/machine_learning_map/index.html
Learning sklearn
- import modules
from sklearn import datasets |
- create data
load iris data,store the attributes in X,store the labels in y:
iris = datasets.load_iris() |
Looking at the dataset, X has four attributes, and y has three categories: 0, 1, and 2:
print(iris_X[:2, :]) |
Divide the data set into training set and test set, where test_size=0.3, that is, the test set accounts for 30% of the total data:
X_train, X_test, y_train, y_test = train_test_split( |
It can be seen that the separated data sets are also disrupted in order, which is better to train the model:
print(y_train) |
- Build a model - train - predict
Define the module method KNeighborsClassifier(), use fit to train training data, this step completes all the steps of training, the latter knn is already a trained model, which can be used directly predict For the data of the test set, comparing the value predicted by the model with the real value, we can see that the data is roughly simulated, but there is an error, and the prediction will not be completely correct.
knn = KNeighborsClassifier() |
Directly download the data and store in my computer. However, it is unprofessional to run code in personal computer. I should looking for a way to solve this problem: rent a server or find a HPC cluster in King’s College.
Succeed at drawing plot
import mne |
epochs = mne.read_epochs(fname) |
availabe_event = [1, 2, 3, 4, 5, 32] |
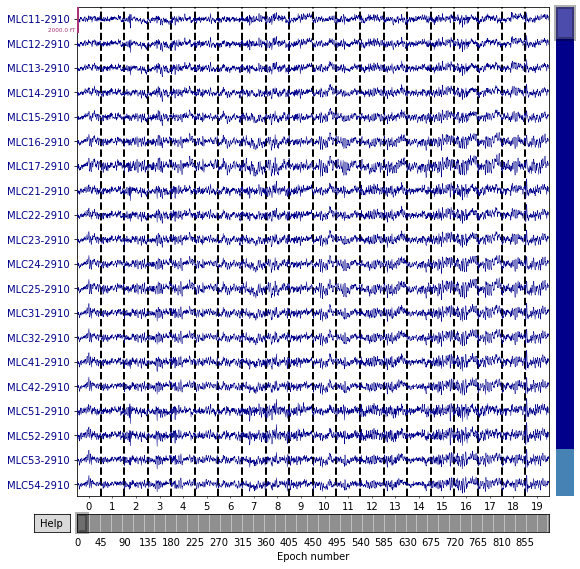
The panel each contains 900 epochs. In these samples, there are no spikes or other distinctive abnormal waveforms. For every single training dataset from various participants, 900 of in total 900 events passed the rejection process. It is because the rejection algorithm was purposefully designed to be inclusive. All data were deliberately included because the CNN model should be robust to noise in the data
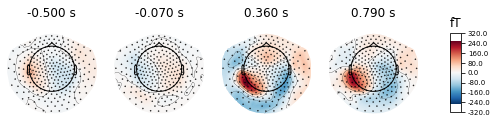
Topological map from -500.00 to 790.00 ms. The brain areas that are activated are concentrated in the downstream temporal region or visual cortex.
A few questions at last:
why do we split the data as 70%, does it work as other ration?
Because we have got enough data to train and need more data to test and valid the training performance.
April 26th
MRI safety training for 2.5 hrs
update Anaconda (start to use a new platform)
Anaconda is a good environment manager tool which allows me to manage and deploy packages
conda update conda
conda update anaconda
conda update --all
done
Python version: 3.8.13-h6244533_0
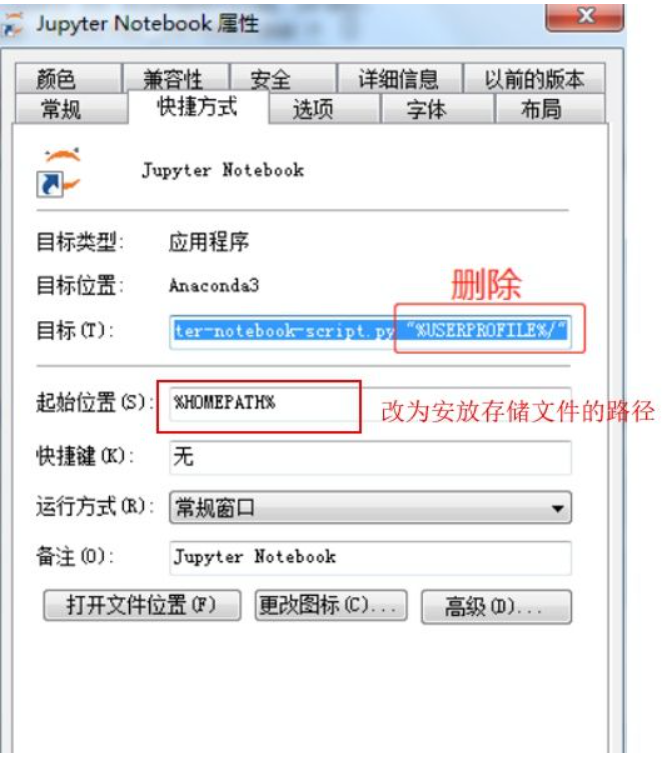
change the directory path of Jupyter notebook (in order to save files in preferred path)
jupyter notebook --generate-configget the config file. change the linec.NotebookApp.notebook_dir = ''to the directory I wantfind jupyter notebook file, change the attributes.
Link the local directory and Github
for the convenience of collaboration
SSH connect public key (id_rsa.pub) was created before.
after create the directory, run the command in git:
git init |
Journal club preparation for the next session
April 27th
Pycharm (use IDE)
Get Pycharm educational version via King’s email
install python 3.8 environment for running the code from https://github.com/tobywise/aversive_state_reactivation (because it was coding with python 3.8 compiler)
run below code in pycharm
!conda create -n py38 python=3.8 |
Fixation for some expired code
The function joblib does not exist in sklearn.external anymore.
Error occurs when run the function plot_confusion_matrix:
Deprecated since version 1.0: plot_confusion_matrix is deprecated in 1.0 and will be removed in 1.2. Use one of the following class methods: from_predictions or from_estimator.
use
ConfusionMatrixDisplay.from_predictions(y, y_pred) |
instead of
plot_confusion_matrix(mean_conf_mat[:n_stim, :n_stim], title='Normalised confusion matrix, accuracy = {0}'.format(np.round(mean_accuracy, 2))) |
Second session meeting
Every people gives a general introduction of their projects
April 28th
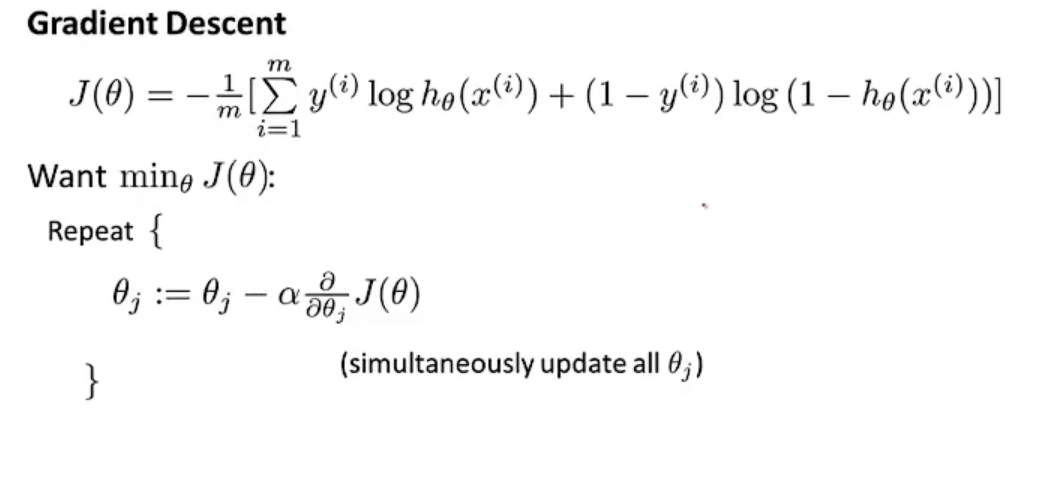
Logistic regression cost function
The function is using the principle of maximum likelihood estimation to find the parameters $\theta$ for different models. At the meantime, a nice property is it is convex. So, this cost function is generally everyone use for fitting parameters in logistic regression.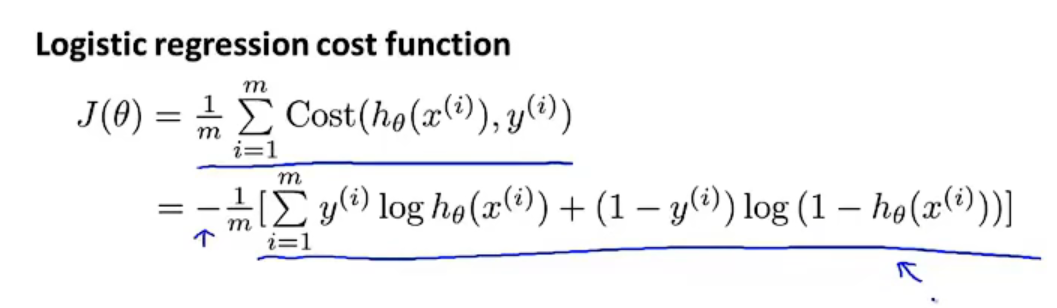
The way we are going to minimize the cost function is using gradient descent:
Other alternative optimization algorithms (no need to manually pick $\alpha$ studying rate):
- Conjugate gradient
- BFGS
- L-BFGS
Methods to storage trained model
set and train a simple SVC model
from sklearn import svm |
Storage:
- pickle
import pickle #pickle module |
- joblib (supposed to be faster when dealing with a large data, because the use of multiprocessing)
from sklearn.externals import joblib #jbolib模块 |
April 29th
Google Colab
Get the subscription of Google Colab and Google drive
clone data to google drive
Token: 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
connect Google Colab with VS code
Regularization
We can use regularization to rescue the overfitting
There are two types of regularization:
L1 Regularization (or Lasso Regularization)
$Min$($$\sum_{i=1}^{n}{|y_i-w_ix_i|+p\sum_{i=1}^{n}|w_i|}$$)
L2 Regularization (or Ridge Regularization)
$Min$($$\sum_{i=1}^{n}{(y_i-w_ix_i)^2+p\sum_{i=1}^{n}w_i^2}$$)
where p is the tuning parameter which decides in what extent we want to penalize the model.
However, there is another method for combination
- Elastic Net: When L1 and L2 regularization combine together, it becomes the elastic net method, it adds a hyperparameter.
how to select:
| No | L1 Regularization | L2 Regularization |
|---|---|---|
| 1 | Panelises the sum of absolute value of weights. | Penalises the sum of square weights. |
| 2 | It has a sparse solution. | It has a non-sparse solution. |
| 3 | It gives multiple solutions. | It has only one solution. |
| 4 | Constructed in feature selection. | No feature selection. |
| 5 | Robust to outliers. | Not robust to outliers. |
| 6 | It generates simple and interpretable models. | It gives more accurate predictions when the output variable is the function of whole input variables. |
| 7 | Unable to learn complex data patterns. | Able to learn complex data patterns. |
| 8 | Computationally inefficient over non-sparse conditions. | Computationally efficient because of having analytical solutions. |
Normalization
The reason for applying normalization is the normalization step can generalize the statistical distribution of uniform samples, which is expected to enhance the training performance.
where m is the total number of data and x represents data, makes the average value and standard deviation of data in each channel to be located in the range between 0 and 1
Question:
which layer should I apply the regularization?
From the model’s summary, I can determine which layers have the most parameters. It is better to apply regularization to the layers with the highest parameters.
In the above case, how to get each layer’s parameters?
from prettytable import PrettyTable |
May 2nd
Question ahead:
get a question: how to determine the classifier centre (windows width)?
for this case, it is around 20 to be at the middle/ top
GPU accelerations
It could be a little bit tricky to accelerate the calculation in sklearn with GPU. Here is a possible solution: https://developer.nvidia.com/blog/scikit-learn-tutorial-beginners-guide-to-gpu-accelerating-ml-pipelines/.
Third meeting:
Deep learning might be the solution for MEG signals classification.
The CNN is a particular subtype of the neural network, which is effective in analysing images or other data containing high spatial information (Khan et al., 2018; Valueva et al., 2020) and also works well with temporal information (Bai et al., 2018)
Khan, S., Rahmani, H., Shah, S. A. A., & Bennamoun, M. (2018). A Guide to Convolutional Neural Networks for Computer Vision. A Guide to Convolutional Neural Networks for Computer Vision. https://doi.org/10.1007/978-3-031-01821-3
Valueva, M. v., Nagornov, N. N., Lyakhov, P. A., Valuev, G. v., & Chervyakov, N. I. (2020). Application of the residue number system to reduce hardware costs of the convolutional neural network implementation. Mathematics and Computers in Simulation, 177, 232–243. https://doi.org/10.1016/J.MATCOM.2020.04.031
Bai, S., Kolter, J. Z., & Koltun, V. (2018). An Empirical Evaluation of Generic Convolutional and Recurrent Networks for Sequence Modeling. https://doi.org/10.48550/arxiv.1803.01271
possible deep learning packages:
JAX, HAIKU
My aim is to inform bad-performance data with the training model of good-performance data in aims to increase the performance. One hallmark is to increase the mean accuracy of each cases as high as possible.
May 3rd
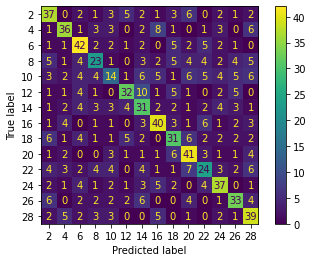
Successfully run the code for confusion matrix.
clf.set_params(**random_search.best_params_) |
pictures of each case are stored in the Github depository:
It takes around 36 minutes to run 28 cases.
Mean accuracy with existing code:
[0.4288888888888889, 0.33666666666666667, 0.2777777777777778, 0.5022222222222222, 0.5066666666666667, 0.4245810055865922, 0.5577777777777778, 0.43222222222222223, 0.65, 0.47888888888888886, 0.3377777777777778, 0.4800469483568075, 0.27111111111111114, 0.37193763919821826, 0.4288888888888889, 0.40555555555555556, 0.46444444444444444, 0.7077777777777777, 0.5811111111111111, 0.4711111111111111, 0.4255555555555556, 0.5022222222222222, 0.45394006659267483, 0.38555555555555554, 0.6222222222222222, 0.4622222222222222, 0.35444444444444445, 0.47444444444444445] |
May 10th
Get rid of the effect of null data
transform X into the same size as clf
May 11th
Grid Search CV
To test Grid Search CV instead of Randomized Search CV
However, the result of grid search CV is worse than the randomized search CV. I think the reason is that random search CV uses a random combination of hyperparameters to find the best solution for a built model. However, the random search CV is not 100% better than grid search CV: the disadvantage of random search is that it produces high variance during computation.
Concatenation
Objective
Since my aim is to transfer the model prediction of one case to anther, I try to concatenate multiple cases data together to train the model and see what will happen.
localiser_epochs = mne.read_epochs(os.path.join(output_dir, 'preprocessing', 'sub-{}', 'localiser', 'sub-{}_ses-01_task-AversiveLearningReplay_run-localiser_proc_ICA-epo.fif.gz').format('001','001')) |
Result
Concatenate X np arrays and test, the mean accuracy increases. I test 5 cases.
Mean accuracy = 0.5111111111111111, while for each cases, previous mean accuracy = 0.43777777777777777; 0.34; 0.2788888888888889; 0.5055555555555555.




The concatenated data gives a better fit:
However, the generalization ability of this method has not been decided yet till now.
May 12th
add ‘participant number’ dimension to X
X_4D = [] |
It takes me 1 hour to make the code logical elegant.
May 13th
Forth meeting
Objective:
We have tested existing code, the following step is to try different models to predict.
My supervisor’s suggestion is to use haiku trying CNN.
pip install -upgrade jax optax dm-haiku |
to be learnt:
active function: rectifier RELU
Result:
New model selection: CNN with Haiku
May 14th
Find a bug: concatenated data was not giving a correct result. The better performance was because of the randomness of every time training. The concatenated data won’t give a better prediction.
possible solution: transfer learning instead of directly concatenation.
May 16th
Objective
to learning deep learning courses (Andrew Ng) in coursera because as said in ‘Knife don’t miss your job’, to solid the foundation of deep learning will help me build the CNN and understand others’ work
Result:
In the context of artificial neural networks, the rectifier or ReLU (Rectified Linear Unit) activation function is an activation function defined as the positive part of its argument.
Convolution
Types of layer in a CNN:
- Covolution
- Pooling
- Fully connected
Cases:
Classic networks:
- LeNet-5
- AlexNet
- VGG
ResNet
Inception
LeNet -5
May 17th
Learning JAX
Question: why jax has its own numpy type: jax.numpy? what is the difference between it and numpy?
Jax.numpy is a little bit different from numpy: the former is immutable
Question: why do we need jax.numpy?
because numpy only works on CPU while jax.numpy works on GPU
another advantage of JAX
jit() can be used to compile the data input thus makes the program run faster
First group meeting
Yiqi introduced his recent work which is based on U-net, VAE
May 18th
Learning JAX
grad() # for differentation |
JAX API structure
- NumPy <-> lax <-> XLA
- lax API is stricter and more powerful
- It’s a Python wrapper around XLA

class CNN(hk.Module): |
May 19th
Test CNN
CNN test was run but the prediction result is not as good as expected:
the performance of it is about 0.4 for training dataset and 0.15 for test dataset.
I think we should try to tune the parameters of model or test a different model since the current model is suitable for image recognition. Before that, literature reviews should be done.
Later after I read Aoe’s work, I start to under stand it is because my image classification CNN model fails to extract the temporal and spatial information.
Aoe, J., Fukuma, R., Yanagisawa, T., Harada, T., Tanaka, M., Kobayashi, M., Inoue, Y., Yamamoto, S., Ohnishi, Y., & Kishima, H. (2019). Automatic diagnosis of neurological diseases using MEG signals with a deep neural network. Scientific Reports, 9(1). https://doi.org/10.1038/S41598-019-41500-X
Fifth meeting
I have the requirement of visualization during training:
To use Tensor Board to show the training process
!rm -rf /logs/ # clear logs |
May 20th
Tried AlexNet (can be easily get from Pytorch hub)
AlexNet
AlexNet = torch.hub.load('pytorch/vision:v0.10.0', 'alexnet', pretrained=True).cuda() |
Resnet 18
Resnet = torch.hub.load('pytorch/vision:v0.10.0', 'resnet18', pretrained=True).cuda() |
These 2 models fail as well. The same reason: these models fail to extract the temporal and spatial information in the first convolutional layers.
Sixth meeting
Objective:
to discuss about that if we should use concatenate data and pre-processing for standardization because the conditions of recording may varies a lot among different subjects: the device position or potential individual reasons.
Results:
Dr. Toby and I had a discussion together with Dr. Rossalin
Rossalin advices me to try transfer learning or LSTM.
After trying the model is usually used in image classification, it is a good idea to try the model LSTM RNN, which is known as a good fit for sequential data.
May 24th
Second group meeting
Zarc gives a presentation about his NLP project.
May 27th
Learning Tensorflow
Tensorflow is a more popular packages which allows me to get access to many templates. Some research is also using Tensorflow as their machine learning library. But I found Pytorch is a more popular packages which allows me to get access to more well-known templates. Most related research is using Pytorch as their machine learning library.
However, I found the variable and placeholder operations are more commonly used in Tensorflow-v1 rather than the latest Tensorflow-v1
Session control
In Tensorflow, a string is defined as a variable, and it is a variable, which is different from Python. (later on I found it was correct in Tensorflow v1 but changes in Tensorflow v2)
state = tf.Variable()
import tensorflow as tf |
If I set variables in Tensorflow, initializing the variables is the most important thing! ! So after defining the variable, be sure to define init = tf.initialize_all_variables().
At this point, the variable is still not activated, and it needs to be added in sess , sess.run(init) , to activateinit. (again, it changes in v2, we do not need to initialize the session in Tensorflow v2)
# Variable, initialize |
Note: directly print(state) does not work! !
Be sure to point the sess pointer to state and then print to get the desired result!
placeholder
placeholder is a placeholder in Tensorflow that temporarily stores variables.
If Tensorflow wants to pass in data from the outside, it needs to use tf.placeholder(), and then transfer the data in this form sess.run(***, feed_dict={input: **}).
Examoles:
import tensorflow as tf |
Next, the work of passing the value is handed over to sess.run(), the value that needs to be passed in is placed in feed_dict={} and corresponds to each input one by one. placeholder and feed_dict={ } are bound together.
with tf.Session() as sess: |
Activation function
when there are many layers, be careful to use activation function in case of the gradient exploding or gradient disappearance.
May 28th
Although in the computer vision field convolutional layer often followed by a pooling layer to reduce the data dimension at the expense of information loss, in the scenes of MEG decoding, the size of MEG data is much smaller than the computer vision field. So in order to keep all the information, we don’t use the pooling layer. After the spatial convolutional layer, we use two layers of temporal convolutional layers to extract temporal features, a fully connected layer with dropout operation for feature fusion, and a softmax layer for final classification. (Huang2019)
It is important to select if we should use pooling layers and how many to use.
May 30th
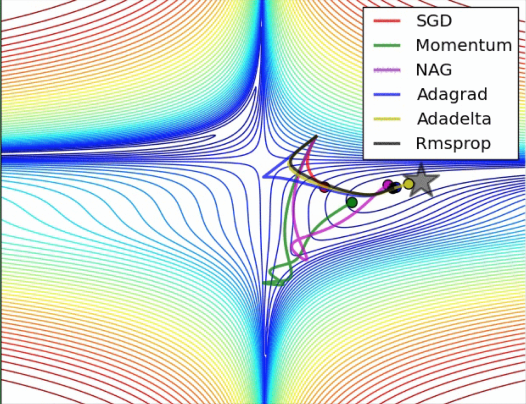
ML optimizer
Objective:
to learn how to use and select different optimizer, because it modifies model’s parameters like weights and learning rate, which helps to increase accuracy and reduce overall loss.
Results:
- Stochastic Gradient Descent (SGD)
- Momentum
- AdaGrad
- RMSProp
- Adam
X.shape gives (n_epochs, n_channels, n_times) corresponding to (batches, pixels,channels) of images
Apart for optimizer, scheduler may help a lot with providing a dynamic learning rate.
impression
As I tried to apply regularization at the same time. It is important to bear in mind, if we give a momentum in SGD (about 0.9), we can easily apply L2 regularization when the weight_decay is larger than 0.
May 31st
Objective:
to learn data augmentation and learn a important rule: “No free lunch theorem”
Results:
D. H. Wolpert et. al. (1995) come up with “No free lunch theorem”: all optimization algorithms perform equally well when their performance is averaged across all possible problems.
For any prediction function, if it performs well on some training samples, it must perform poorly on other training samples. If there are certain assumptions about the prior distribution of the data in the feature space, there are as many good and bad performances.
Later I found relative power spectrum including delta (0.5-4 Hz), theta (4-8 Hz), alpha (8-12 Hz), beta (12-30Hz), and gamma (above 30 Hz), provide important information to augmenting the MEG data.
X_train_numpy = X_train_tensors.cpu().numpy() |
Jun 1st
Seventh meeting
Dr Toby provide me the code to load data with dataloader
it defines load_MEG_dataset function with following parameters:
def load_MEG_dataset( |
Jun 6th
Objective:
to try different loss function, because different evaluating methods may affect the learning process, and lead to a different approach to training results.
Results:
when apply other loss function instead of CrossEntropy, there are some format error occurs:
solution: transform inputs from multi hot coding into one hot coding.
def onehot(batches, n_classes, y): |
Later I found that we can use the function in Pytorch: F.onehot
Jun 7th
try different models, reshape the data from [batches, channels, times point ]to be [batches, times point, channels] in corresponding to images format [batches, picture channels (layers), pixels] (not the same channels, the same names but different meanings, former one is electrode channels. latter one is picture layers)
Jun 8th
Third session meeting
Objective:
to learn the key points of writing a good introduction
Results:
from the history of ML to the current meaning
- The history of ML, (black box…)
- the history of disease classification or behaviour prediction
- how people use the ML techniques to predict behaviours these days
- what is aversive state reactivation (one sentence); why people want to learn aversive state reactivation
- how people tried to connect ML with aversive state reactivation
- the problem (gap) is previous model only gives a low prediction accuracy
- Introduction of CNN, LSTM, RNN or transfer learning
- My aims is to optimize the model with new techniques: CNN, LSTM RNN or transfer learning
Note: state what in each paragraph is not enough and leads to the next paragraph.
LSTM RNN
Objective:
try LSTM RNN
Results:
The problems when I try to use one hot data labels = F.one_hot(labels), it is not applicable because in that case the dimensions could be 28 instead of 14 as we only have even numbers,
Some packages automatically figure out where there missing labels during one hot operation but this one (pytorch) doesn’t
Eighth meeting
questions:
- loss functions give similar values?
-
is it correct to use enumerate to loop each data?
In my case, CrossEntropy is the better for MEG data. It is the experience gained from Dr Toby. Even though I found the others’ research about hands behaviour prediction used MSE loss. It is not suitable for our results because theirs is about the movements while ours is not.
Jun 9th
Label noise.
Objectives:
to figure out if labels format it self may affect the model performance. Because some models only accept data in one kind of format.
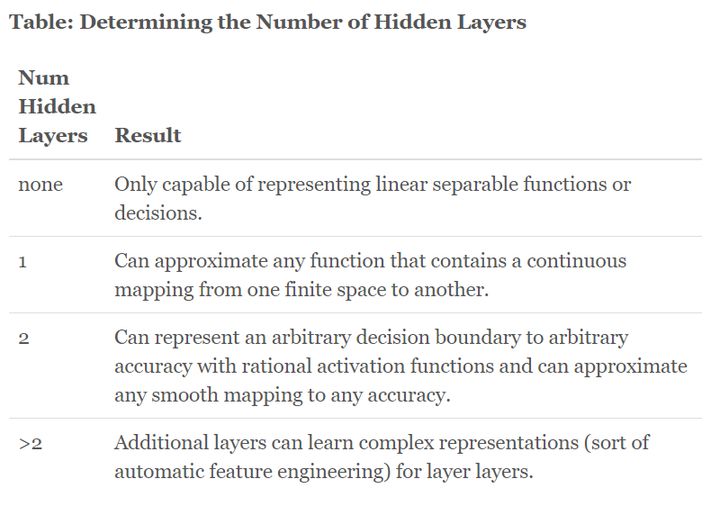
question: how to determine numbers of hidden layers in LSTM RNN.
Results:
We cannot correctly compare each label when we are using one-hot format. If the labels you predict are apples, bananas, and strawberries, obviously they do not directly have a comparison relationship. If we use 1, 2, 3 as labels, there will be a comparison relationship between the labels. Distances are different. With the comparison relationship, the distance between the first label and the last label is too far, which affects the learning of the model.
One promotion:
Knowledge distillation (KD) improves performance precisely by suppressing this label nosie. Based on this understanding, we introduce a particularly simple improvement method of knowledge disillation, which can significantly improve the performance of ordinary KD by setting different temperatures for each image.
Xu, K., Rui, L., Li, Y., Gu, L. (2020). Feature Normalized Knowledge Distillation for Image Classification. In: Vedaldi, A., Bischof, H., Brox, T., Frahm, JM. (eds) Computer Vision – ECCV 2020. ECCV 2020. Lecture Notes in Computer Science(), vol 12370. Springer, Cham. https://doi.org/10.1007/978-3-030-58595-2_40
Hidden layers in LSTM RNN
The effect of the number of hidden layers for neural networks
Jun 10th
try CrossEntropyLoss() with onehot format data
convert the labels from “every 2 in 0 to 28” to “every 1 in 1 to 14”
y_train = (y_train / 2) - 1 |
use with torch.autocast('cuda') to solve “cuda error” of CrossEntropyLoss()
with torch.autocast('cuda'): |
Jun 12th
even though the accuracy of prediction for train data increases quickly as training, the accuracy for test data is still very low. It seems the validation loss does not converge. I decide the next step is going to do more literature research and adjust the parameters.
Jun 13th
Problems:
the problem is overfitting. There could be 2 alternative options: 1, get more data; 2, try different learning rate or dynamic learning rate.
the way the train-test split worked wasn’t ideal in the data loading function - because the data wasn’t shuffled prior to splitting, the train and test set would often consist of different subjects if we load multiple subjects. The data can be shuffled before splitting (by setting shuffle=True), which means that there will be a mix of subjects in both the training and testing data. This seems to boost accuracy in the test set a little bit.
Jun 14th
Objective:
to try CosineEmbeddingLoss() because it is reported that cosine loss may improve the performance for small dataset
Cosine loss could have better performance for small dataset (around 30%).
Barz, B., & Denzler, J. (2019). Deep Learning on Small Datasets without Pre-Training using Cosine Loss. Proceedings - 2020 IEEE Winter Conference on Applications of Computer Vision, WACV 2020, 1360–1369. https://doi.org/10.48550/arxiv.1901.09054
Results:
however, the performance is not promoted
Jun 15th
Fourth session meeting
I read others work, practice to extract the key words and main ideas:
Affective modulation of the startle response in depression: Influence of the severity of depression, anhedonia and anxiety
startle reflex (SR)
- affective rating
get affective rating after participants watched every clips
and analysis the difference between depressed patients and control.
Startle amplitude
EMG
higher baseline EMG activity during pleasant and unpleasant clips, relative to the neutral clips
Conclusion
a reduced degree of self-reported mood modulation
Gap
The findings differ from those of Allen et al. (1999): they think it does not matter for depression or anhedonia for affective and emotional modulation.
key wards
Depression
Anxiety
Anhedonia
Affective modulation
Mood regulation
Startle response
EMG
affective rating
Ninth meeting
Problems:
Since the past work does not give a good result and it has been nearly halfway of the project. My following work is suggested to be focused on:
Multilayer Perceptron
transfer learning
Jun 16th
Convolutional Layer : Consider a convolutional layer which takes “l” feature maps as the input and has “k” feature maps as output. The filter size is “n*m”.
Here the input has l=32\ feature maps as inputs, k=64\ feature maps as outputs and filter size is n=3 and m=3\. It is important to understand, that we don’t simply have a 33 filter, but actually, we have *3*3*32** filter, as our input has 32 dimensions. And as an output from first conv layer, we learn 64 different 3*3*32 filters which total weights is “n*m*k*l”. Then there is a term called bias for each feature map. So, the total number of parameters are “(n*m*l+1)*k”.https://medium.com/@iamvarman/how-to-calculate-the-number-of-parameters-in-the-cnn-5bd55364d7ca
bicubic interpolation: torch.nn.functional.interpolate() with mode=’bicubic’
https://stackoverflow.com/questions/54083474/bicubic-interpolation-in-pytorch
Meeting these data and fitting problems, I realize the insufficiency of understanding data itself, so I look back to the Machine Learning courses materials from 2 years ago, trying to get some new approaches.
When reading the Chapter 1 of Computational Modelling of Cognition and Behaviour, I get the following points:
- Data never speak for themselves but require a model to be understood and to be explained.
- Verbal theorizing alone ultimately cannot replace for quantitative analysis.
- There are always several alternative models that vie for explanation of data and we must select among them.
- Model selection rests on both quantitative evaluation and intellectual and scholarly judgment.
June 21th
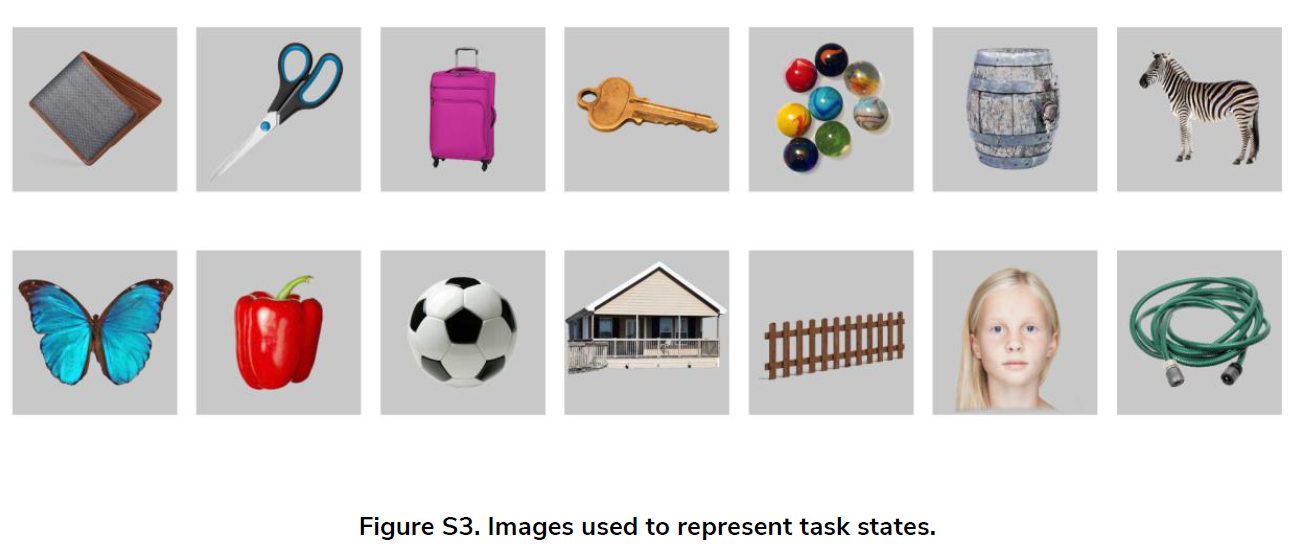
Have a meeting with Eammon, we talked about my recent work:
Eammon gives me a suggestion: in behaviour level, picture of faces are different. Try and see what if we get rid of the picture of faces in labels.
Here are the pictures shown to participants:
June 25th
to try Mnet (was used to predict the Alzheimer’s disease by Aoe .etc)
Aoe, J., Fukuma, R., Yanagisawa, T. et al. Automatic diagnosis of neurological diseases using MEG signals with a deep neural network. Sci Rep 9, 5057 (2019). https://doi.org/10.1038/s41598-019-41500-xz
Score method:
As an alternative option, the accuracy can be expressed as root mean square error.
Jun 27th
Objective:
to apply data augmentation because it was reported that relative power spectrum provide extra information which may improve model’s performance on MEG data.
Result:
one possible solution is to extract band power to augment the data
“This model was implemented to check the proprieties of the RPS to extract meaningful features from the input data. The RPS was combined with an MLP to add nonlinearity and increase the capability of approximate the target variable.”
The RPS was implemented in 4 steps:
- Compute the modified periodogram using Welch methods (Welch 1967) to get the power spectral density.
- Calculate the average band power approximating using the composite Simpson’s rule to get it for a specific target band.
- Divide the average band power of the specific target band by the total power of the signal to get the relative power spectrum.
Anelli, M. (2020). Using Deep learning to predict continuous hand kinematics from Magnetoencephalographic (MEG) measurements of electromagnetic brain activity (Doctoral dissertation, ETSI_Informatica).
X_train_bp = np.squeeze(X_train_numpy, axis=1) |
June 28th
Problem:
My Google Colab subscriptions is expired but luckily I have got the access of HPC in KCL (create)
Solution:
set up cluster as the tutorial: https://docs.er.kcl.ac.uk/CREATE/access/
- Start an interactive session:
srun -p gpu --pty -t 6:00:00 --mem=30GB --gres=gpu /bin/bash |
Make a note of the node I am connected to, e.g. erc-hpc-comp001
sinfo avail to check the available cores
- start Jupyter lab without the display on a specific port (here this is port 9998)
jupyter lab --no-browser --port=9998 --ip="*" |
- Open a separate connection to CREATE that connects to the node where Jupyter Lab is running using the port you specified earlier. (Problems known with VScode terminal)
ssh -m hmac-sha2-512 -o ProxyCommand="ssh -m hmac-sha2-512 -W %h:%p k21116947@bastion.er.kcl.ac.uk" -L 9998:erc-hpc-comp031:9998 k21116947@hpc.create.kcl.ac.uk |
- Note:
- k12345678 should be replaced with your username.
- erc-hpc-comp001 should be replaced with the name of node where Jupyter lab is running
- 9998 should be replaced with the port you specified when running Jupyter lab (using e.g.
--port=9998) - authorize via https://portal.er.kcl.ac.uk/mfa/
Start notebook in http://localhost:9998/lab
VS code part: set the Jupyter server as remote :
http://localhost:9998/lab?token=XXX
# replace the localhost as erc-hpc-comp031Note: However, After the latest weekly update, existing problem has been found is the connection via VS code is not stable. Reason could be the dynamic allocated node and port confuses the VS code connection server.
June 29th
Objective:
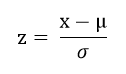
to try different normalization method: Z-Score Normalization
Results:
which maps the raw data to a distribution with mean 0 and standard deviation
- Assuming that the mean of the original feature is μ and the variance is σ , the formula is as follows:
July 1th
Objective:
to try Mnet with band power (RPS Ment); the reason for splitting alpha into low and high is that kinematic show that alpha band significant after movement and beta before movement. It is also reported that gamma band is associated with it is related to synergistic muscle activation (Kolasinski et. al, 2019)
Kolasinski, J., Dima, D. C., Mehler, D. M. A., Stephenson, A., Valadan, S., Kusmia, S., & Rossiter, H. E. (2019). Spatially and temporally distinct encoding of muscle and kinematic information in rostral and caudal primary motor cortex. BioRxiv, 613323. https://doi.org/10.1101/613323
Results:
extract band powers to get a 6 RPS (relative power spectrum) for each frequency period:
def bandpower_1d(data, sf, band, nperseg=800, relative=False): |
In main code:
X = np.swapaxes(X_train, 2, -1).squeeze() |
The average power spectrum for all subjects:
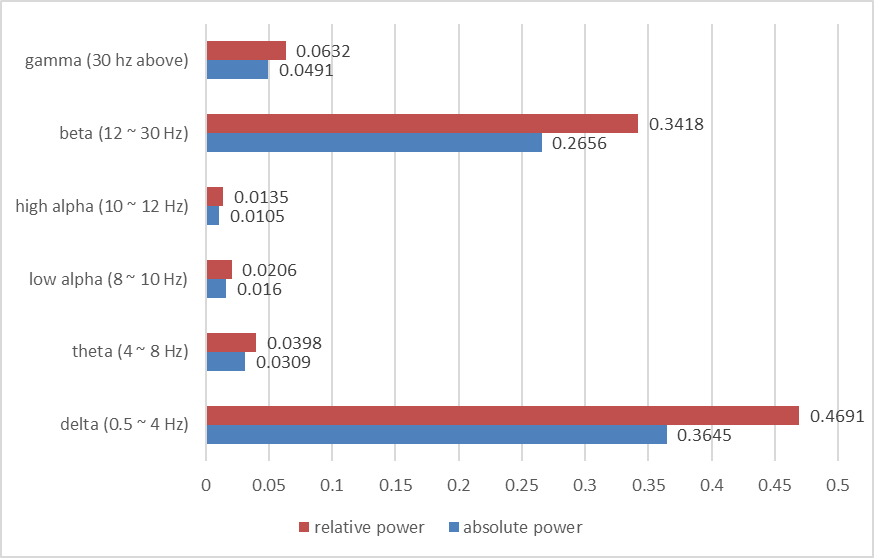
The results show that beta and delta waves are in the large and major proportion. It may be considered as potential evidence that beta and delta waves are associated with not only anxious thinking, and active concentration (Baumeister et al., 2013), but also the aversive state. In the following classifier task, these findings are in line with results showing the involvement of beta and delta in concentration.
Baumeister, J., Barthel, T., Geiss, K. R., & Weiss, M. (2013). Influence of phosphatidylserine on cognitive performance and cortical activity after induced stress. Http://Dx.Doi.Org/10.1179/147683008X301478, 11(3), 103–110. https://doi.org/10.1179/147683008X301478
Problems:
find the initial loss is too huge and does not change afterwards. Guess it is because of too large initial loss or wrongly loss.backward()
solution:
parameters of optimizer was set wrongly, fix it with model.parameters()
July 2th
Problems:
looking for solution to merge the function
guess I am meeting “dying ReLU” problem
July 5th
Objectives:
to try dynamic learning rate and interpolate 130 time points to be 800 time points without losing too much information.
Solution:
scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(optimizer, 'max') |
the update step: I use the dynamic learning rate when the valid loss approaches a plateau (function 4, where  represents learning decay and L represents valid loss).
represents learning decay and L represents valid loss).

Multilayer perceptron
interpolate https://pytorch.org/docs/stable/generated/torch.nn.functional.interpolate.html
Learning rate scheduling https://pytorch.org/docs/stable/optim.html
July 9th
In order to make the input data the same shape as required, I use resample function localiser_epochs.copy().resample(800, npad='auto') to upsamle the data
CBAM modules are added because the attention block is composed of 2 parts: the channel attention module and the spatial attention module. Two modules help model focus more on the important information: channel dimension and spatial dimension. First, for the channel attention module, input data process average pooling and max pooling separately, where the average pooling layer is used to aggregate spatial information and the max pooling layer is used to maintain more extensive and precise context information as images’ edges.
Attention in Deep Learning, Alex Smola and Aston Zhang, Amazon Web Services (AWS), ICML 2019
class SpatialAttention(nn.Module): |
July 10th
In order to find the rationality of extracting features of brain states under different stimuli. I draw the topographical maps of all stimuli at different time. It may suggest that stimulus representations are in the downstream temporal region or visual cortex. Thus, as the following training results showed, my model is an effective and reasonable approach to classifying these states.
sti=[1,2,3,4,5,6,7,8,9,10,11,12,13,14] |
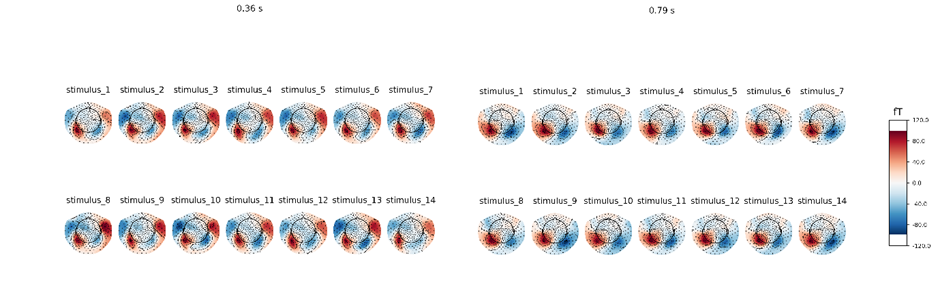
brain topographical map under different stimuli in the specific time (0.36 s, 0.79 s after giving the stimuli). The average brain states of all 24 subjects in all 14 stimuli are shown as the topographical map. The map shows these different brain states as an intensity map, where the red colour shows stronger intensity and blue shows weaker intensity.
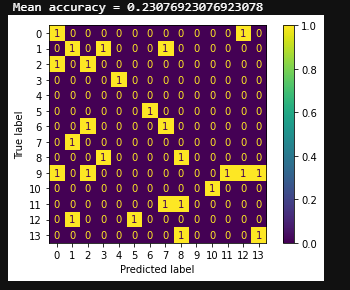
July 12th
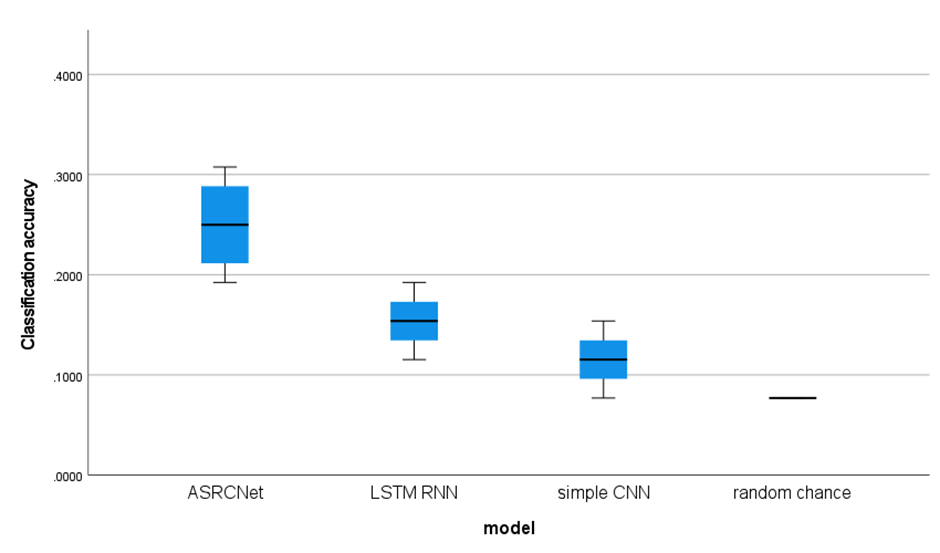
The random prediction accuracy is expected to be 7.14% (1/14 = 7.14%). The classification accuracy of my model is around 23.07%, which is clearly higher than random chance. LSTM RNN gives an accuracy of about 15.38% while simple CNN only gives a mean accuracy of 11.53%. Compared with the other classification approach, my model exhibits the best classification performance (p = 6.8 × 10 –2 for LSTM RNN, p = 5.9 × 10 –2 for CNN, paired Wilcoxon signed-rank tests). The best classification accuracy of my model is able to reach 33.33%.
early stopping was finally adopted when the number of epochs reaches around 130 in case of overfitting:
class EarlyStopping: |
However, would early stopping necessarily prevent overfitting? There’s some interesting work showing that if you over-train the model it actually suddenly gets a lot better at some point (an approach referred to as “grokking” for some reason). It may be possible that more training doesn’t necessarily mean worse performance.
July 13th
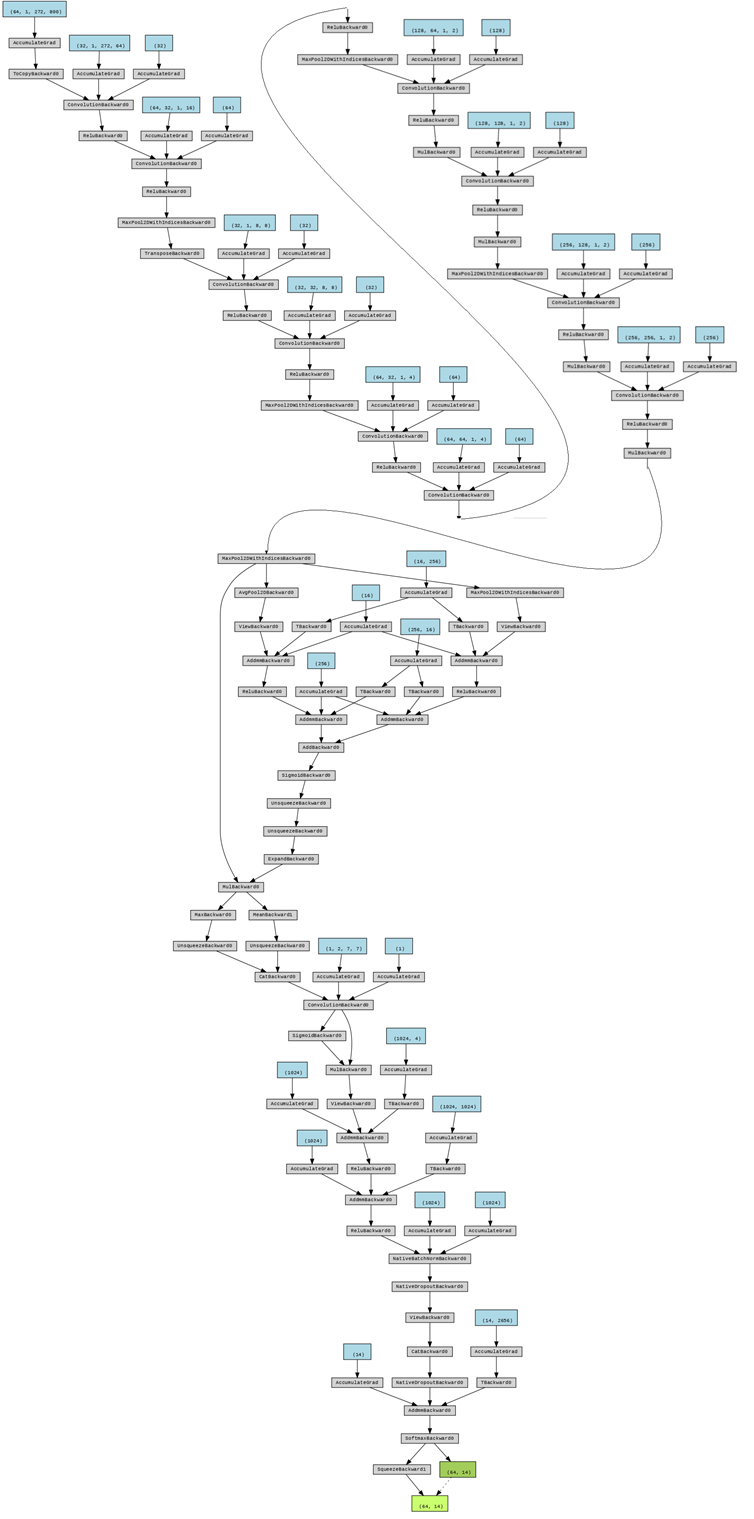
I want to visualize my model and data process steps.
First save the model as .onnx file:
x = torch.randn(64, 1, 272, 800).requires_grad_(True).cuda() |
And I generate the flow chat of this model with Netron:
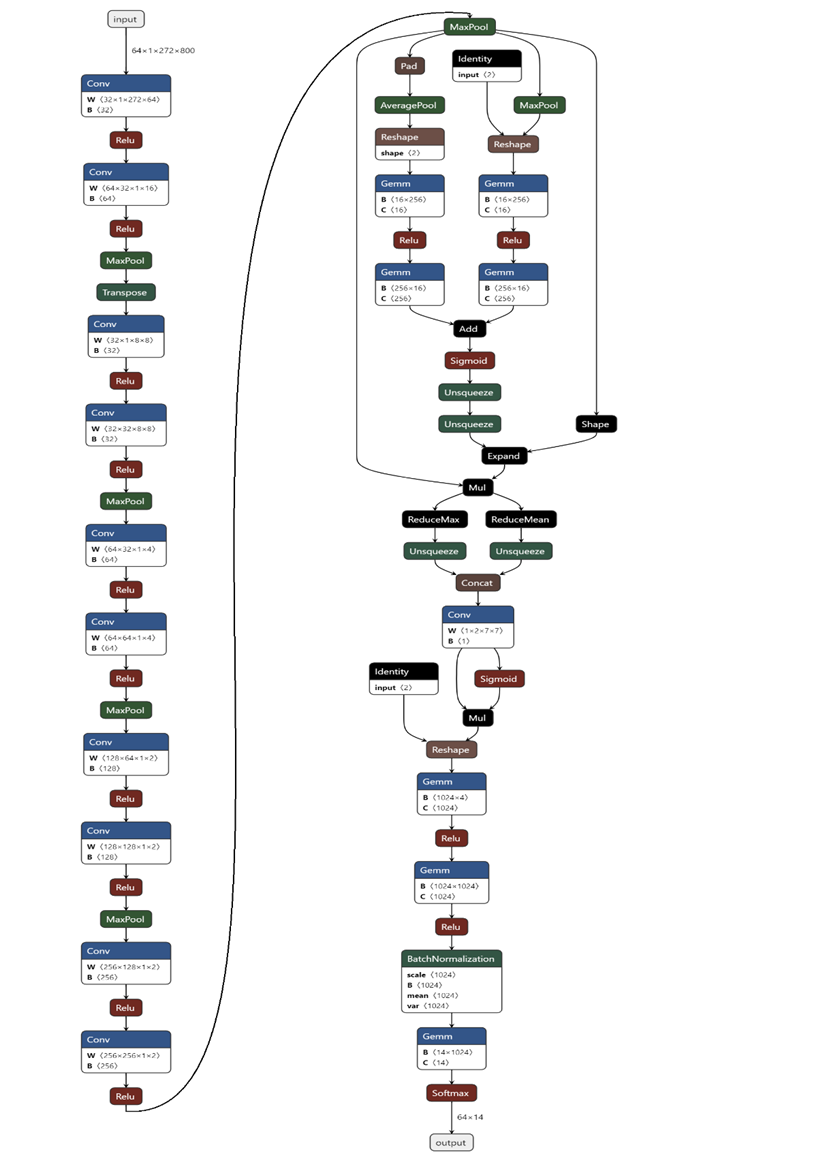
Detailed configuration of my model. Cov: convolution; Relu: rectified linear unit; MaxPool: max pooling; AveragePool: average pooling; Concat: concatenation; Identity: stands for relative power spectrum; Gemm: general matrix multiply
The steps data are processed is generated with following code:
import hiddenlayer as hl |
July 15th
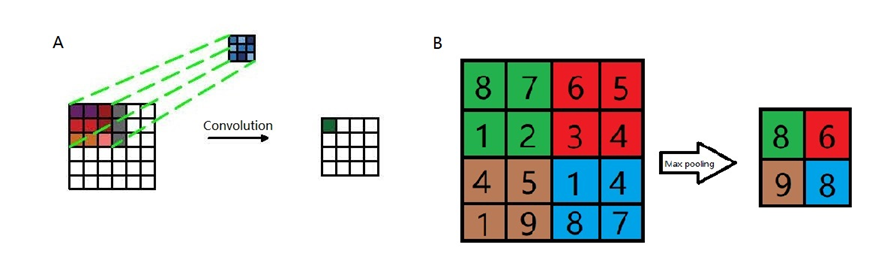
I want to visualize the pooling and convolution operations, so I use CAD to draw the illustrations:
As shown in figure A, a kernel filter is applied to the input data pixel: after summing up input values and filter, a result value is generated and passed to the next step. With all similar processes conducted step by step, a feature map is generated. Afterwards, the max pooling step (figure B) comes to decrease the dimensions of data in order to keep more neurons activated which is reported to reduce the overfitting as well